Simulation Environment
In order to test the software package in simulation environment, WoLF was used. This package provides whole-body controller, along with the robot description files and some interesting worlds for Boston Dynamics Spot robot, as well as several other famous quadruped robots.
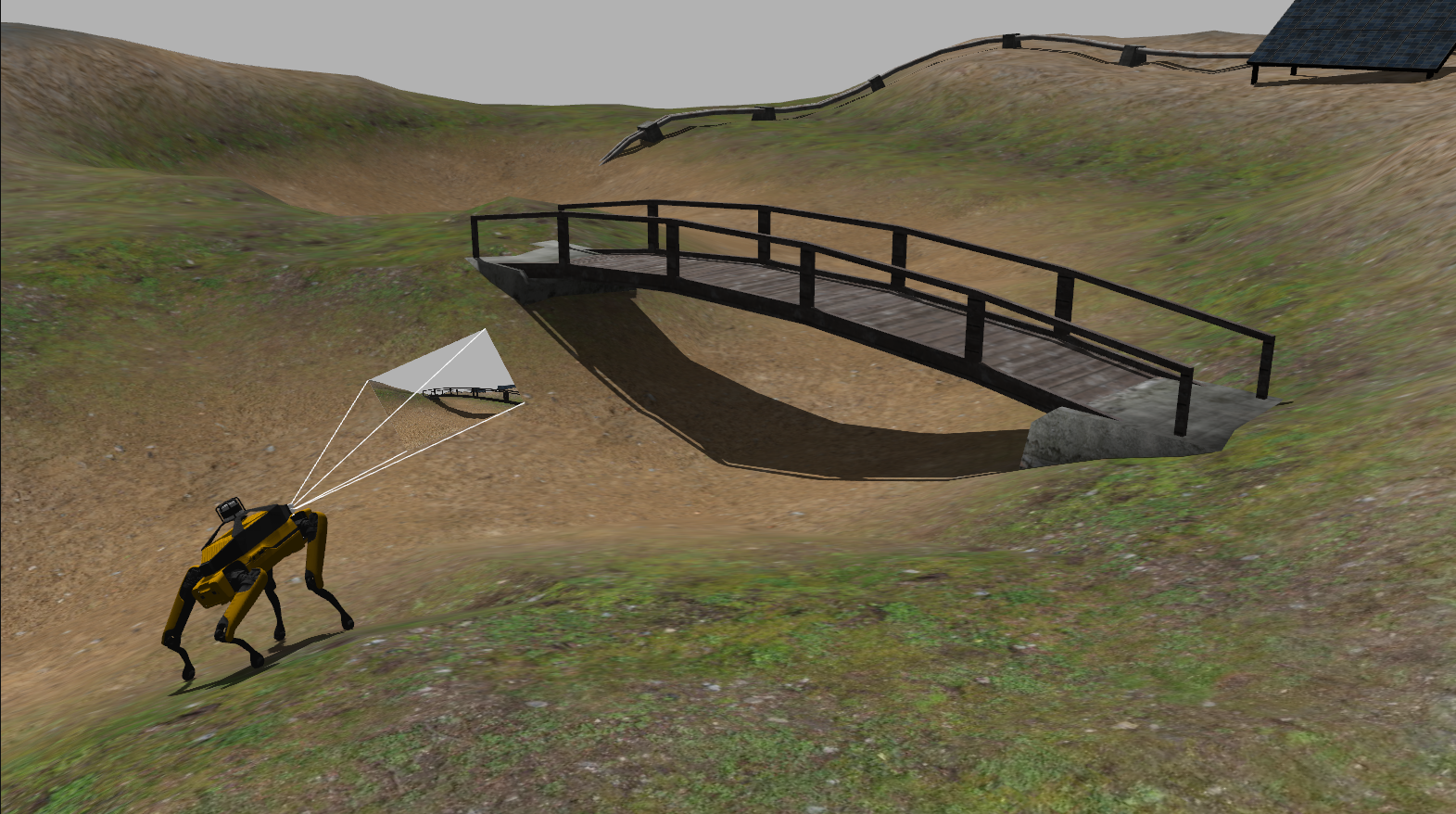
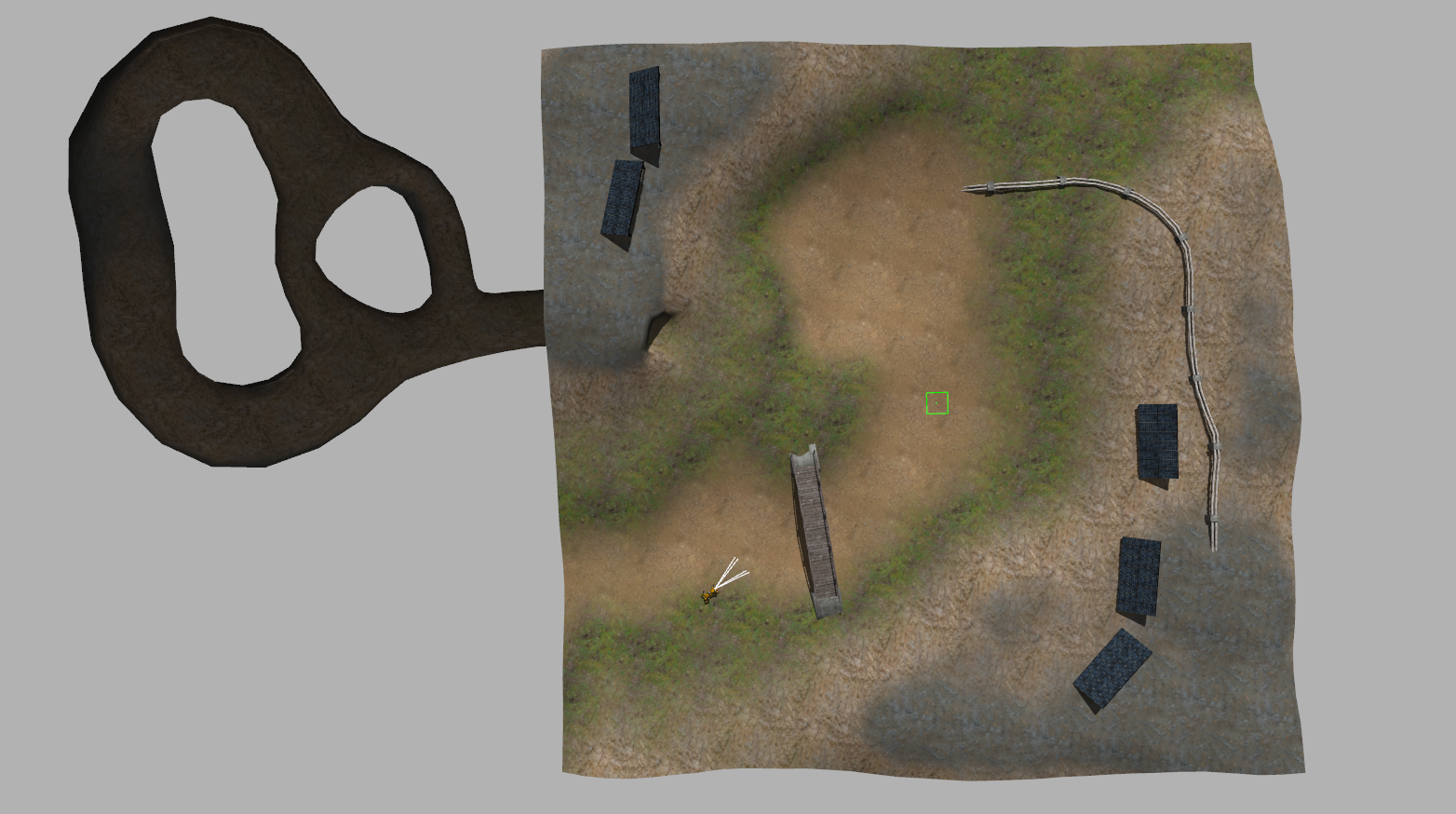
Here is a preview from the simulation environemnt, while the uphill and downhill test are made to see the planner’s performance.