Sequence Diagram
The sequnce diagram of this experiment is represented in the following figures.
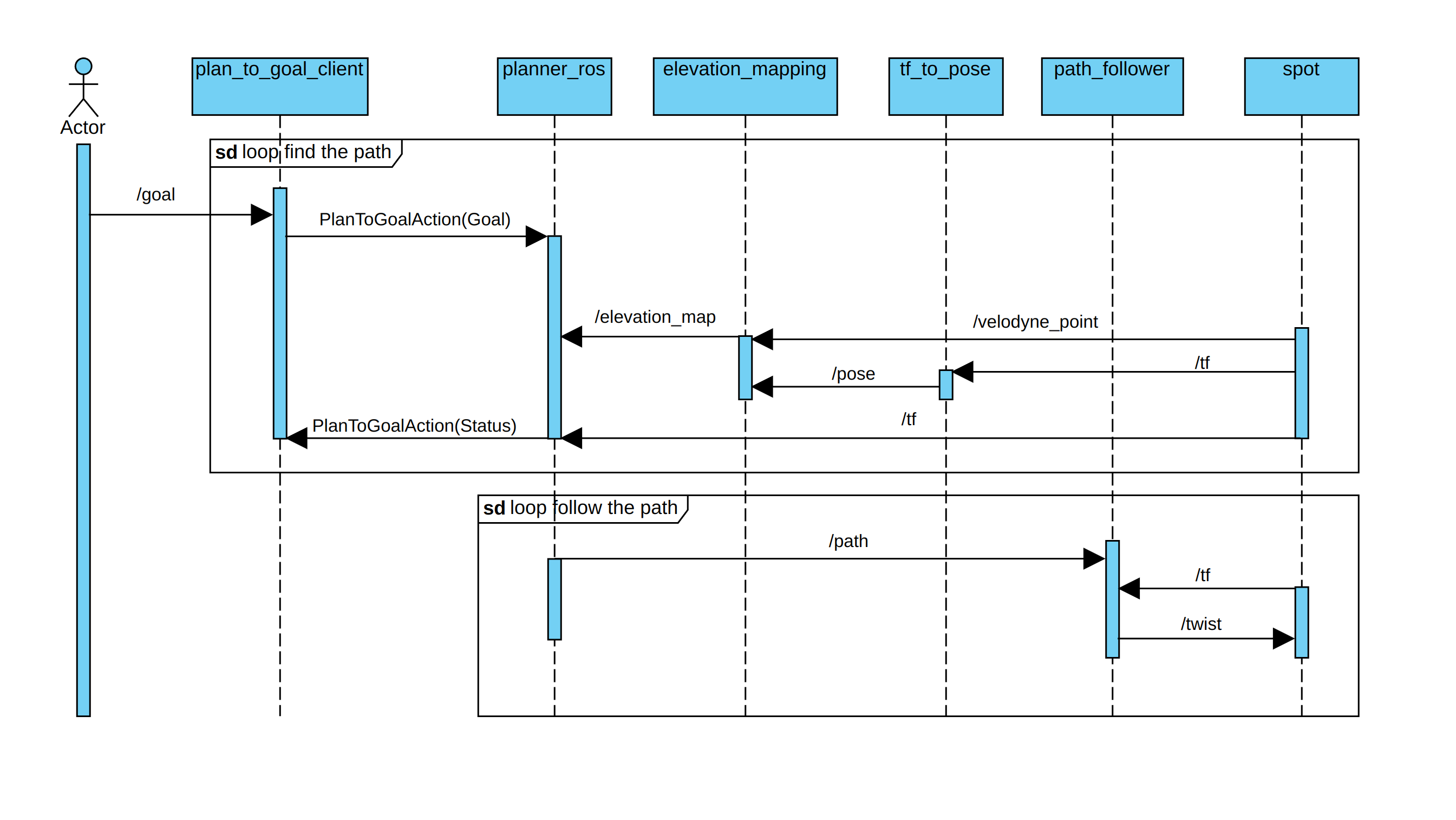
Simulation:
Real world:
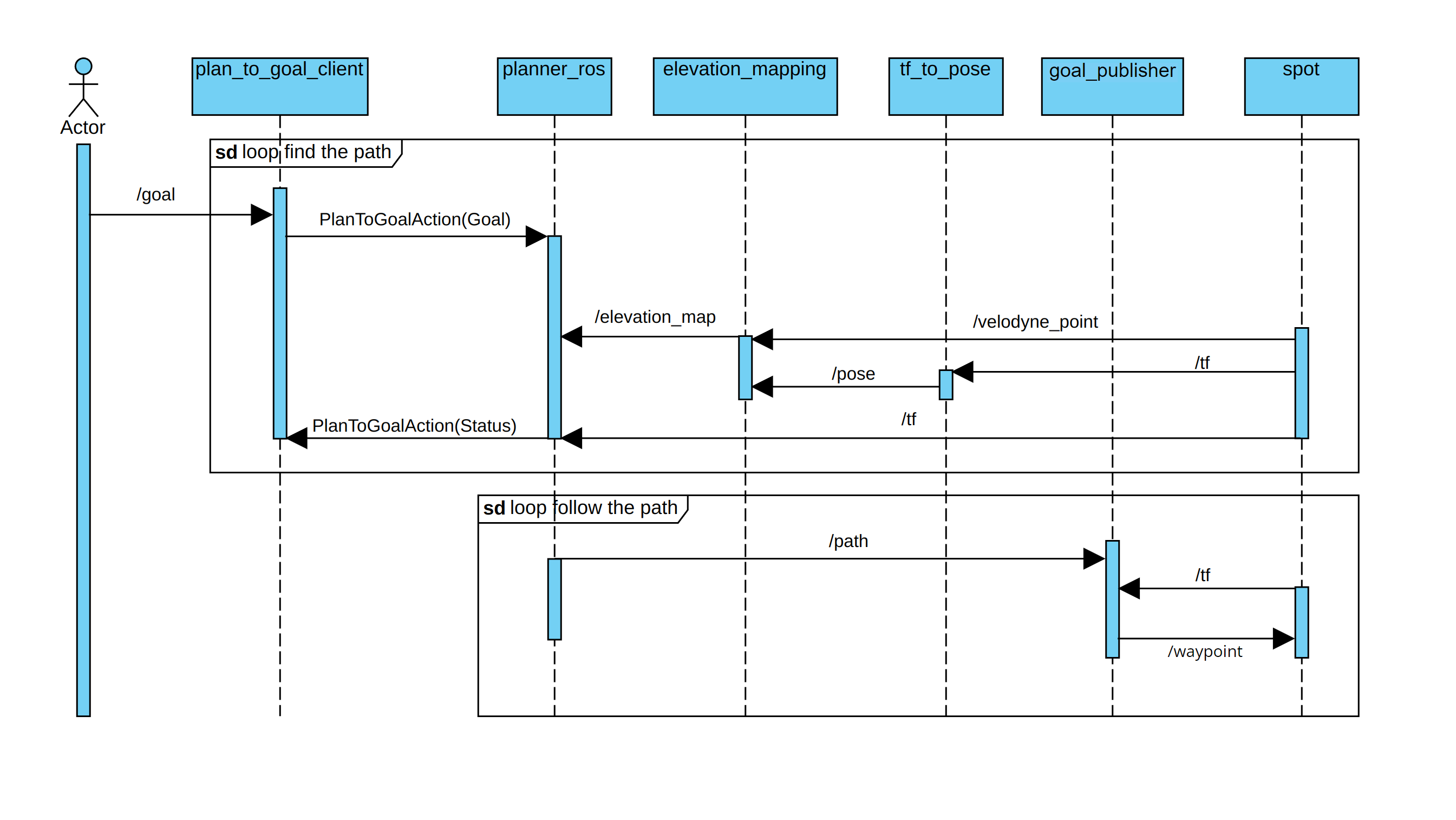
In the first loop, in which the path planning occurs, the planner gets the goal
state as an action goal, elevation map data, and robot’s current state. Once the
solution is found, it triggers the second loop, which is for path following task.
In simulation mode, path_follower would act as local planner, using a PID controller,
while in the real world experiment, goal_publisher sends the next waypoint to the Spot robot’s
available local planner.