Temporal Diagram (UML Sequence Diagram)
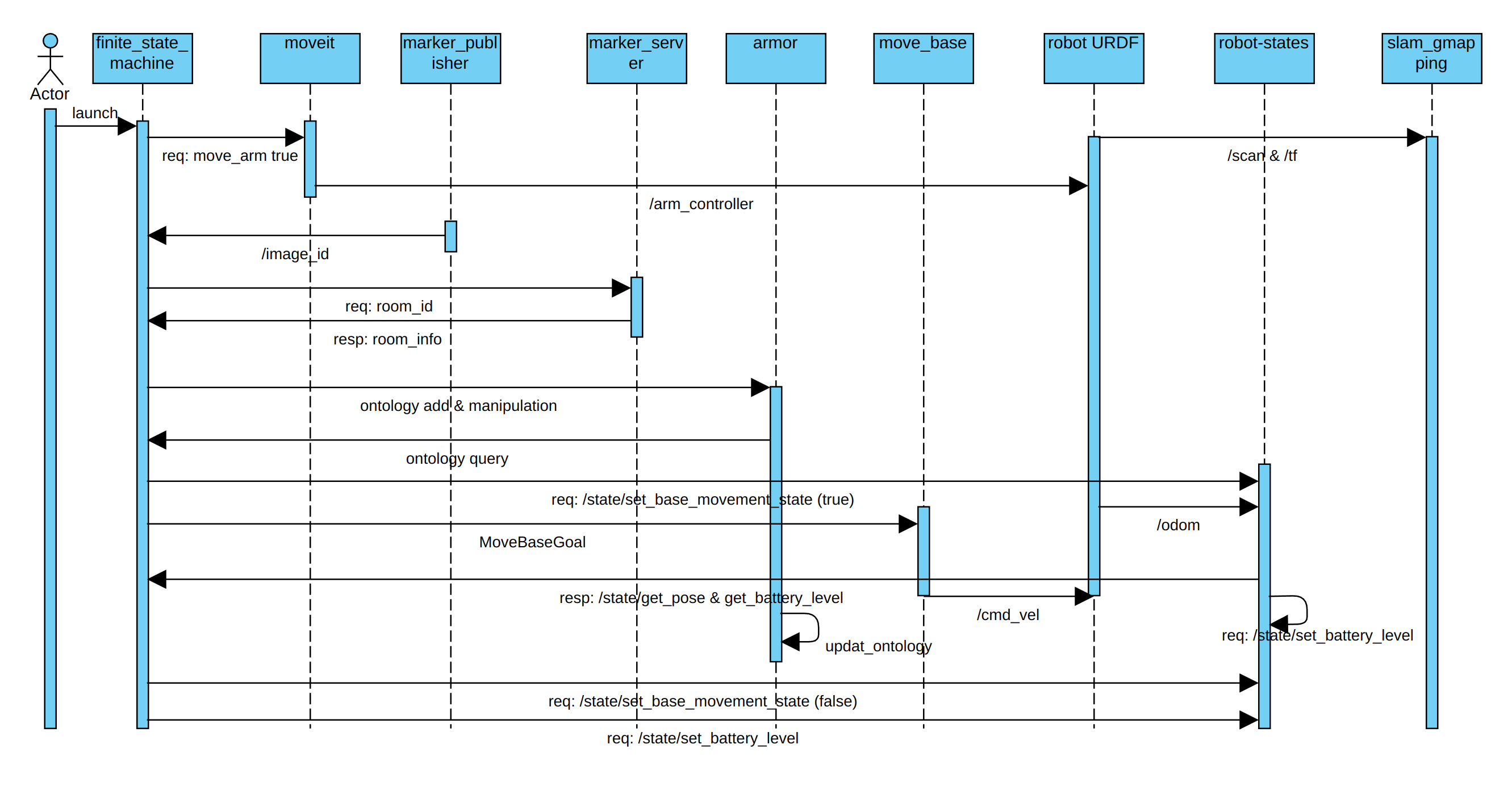
The following figure represents the UML sequence diagram of this package. In the initial state, user launches the nodes,
finite_state_machine calls move_arm service to initialze robot arm movement using moveit. Markers
get scanned by robot camera and for each marker image_id would be detected. finite_state_machine requests room_info
by sending room id and build semantic map in the ontology. Then base_movement_state gets true by finite_state_machine node
for enabling robot-states node to simulate battery consumption and target room position would be sent to moveit
node to find the path and move the robot base. Once the robot gets to target position base_movement_state gets false
and robot starts exploring the room like the beginning of the sequence.