Simulation Environment
The simulation software in this package is gazebo. The environment in which the robot should implement the scanning and patrolling behaviors, is shown in the following figures:
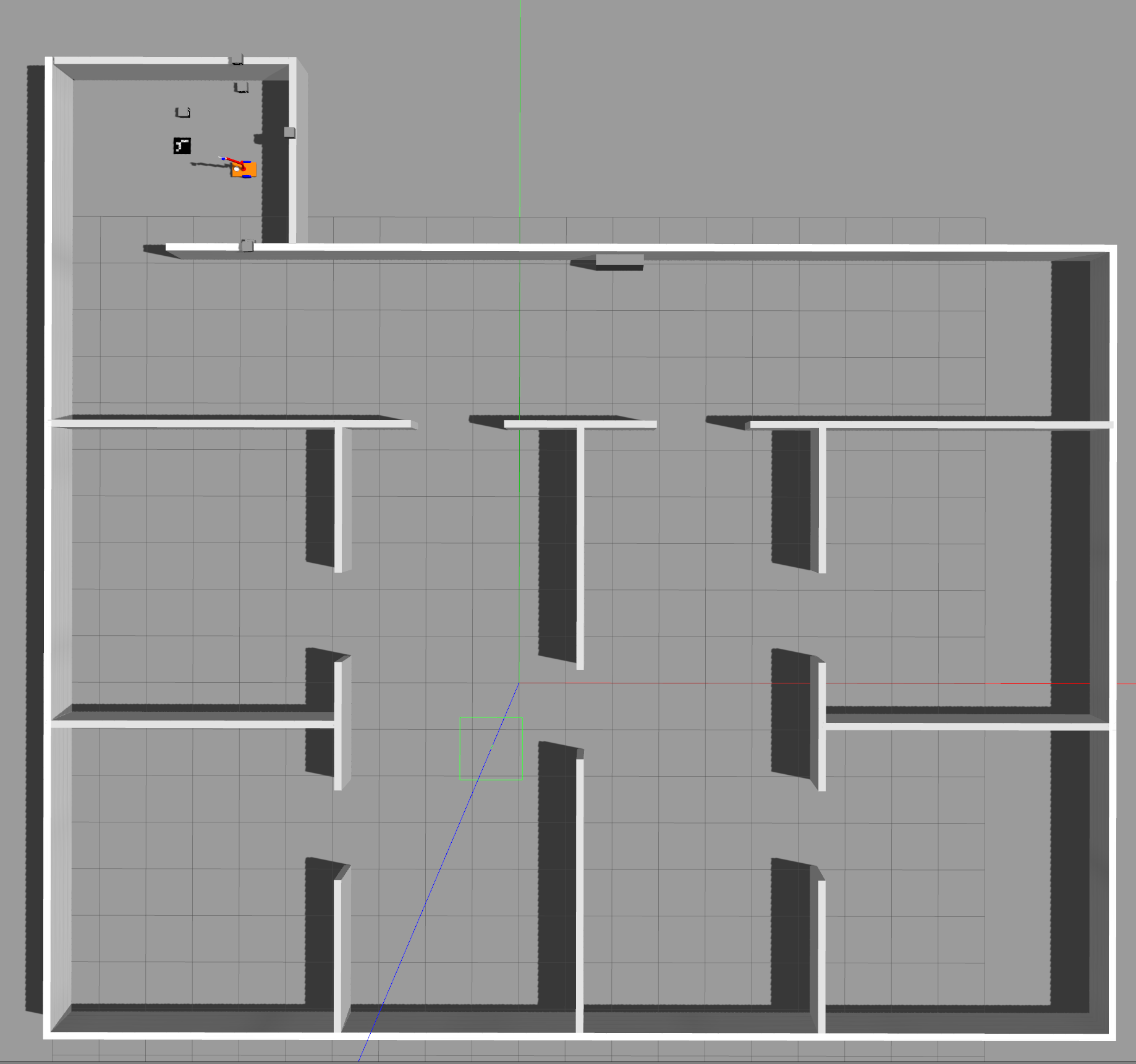
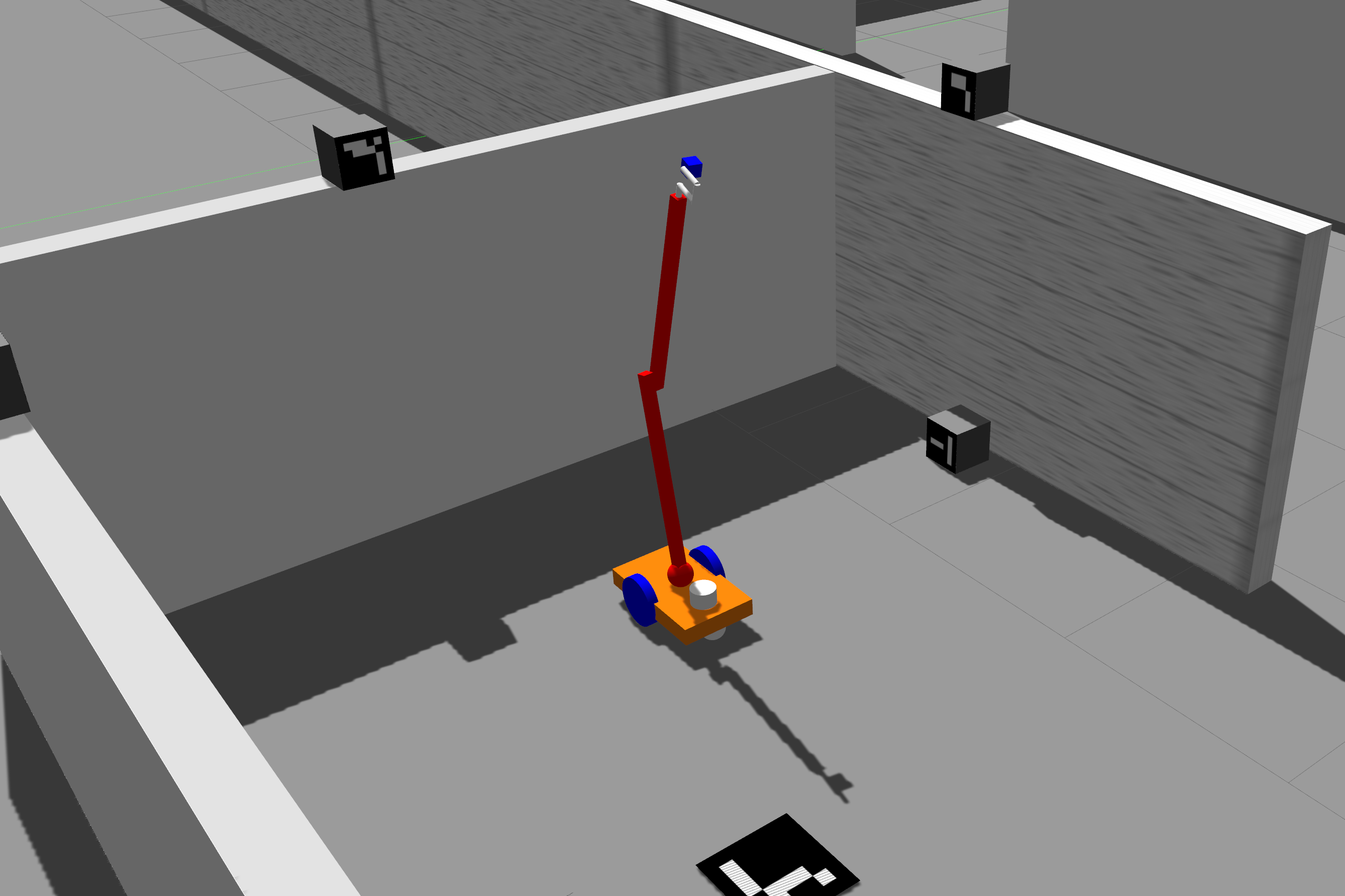
The simulation software in this package is gazebo. The environment in which the robot should implement the scanning and patrolling behaviors, is shown in the following figures: